人体皮肤能够同时感知并区分温度、压力等多样外界刺激,为柔性传感器的发展提供了重要灵感。然而,在现有的大多数多模态电子纺织品中,当通过单一通道读取温度和压力信号时,常出现信号串扰问题,严重影响感知的准确性和可靠性。如何在单一传感器平台上实现高灵敏度、宽检测范围的同时,有效分离温度和压力信号,成为该领域亟需解决的关键难题。
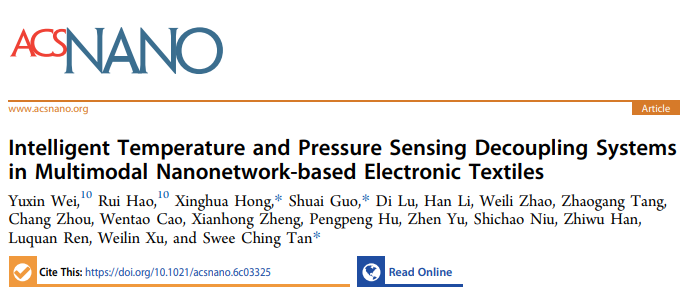
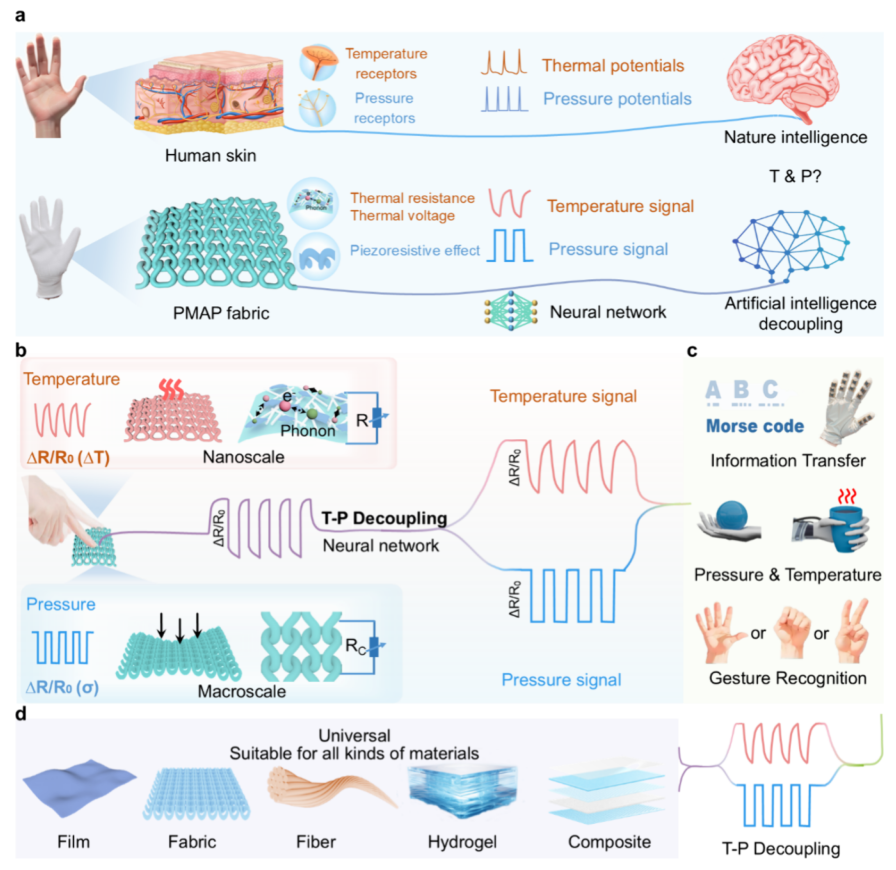
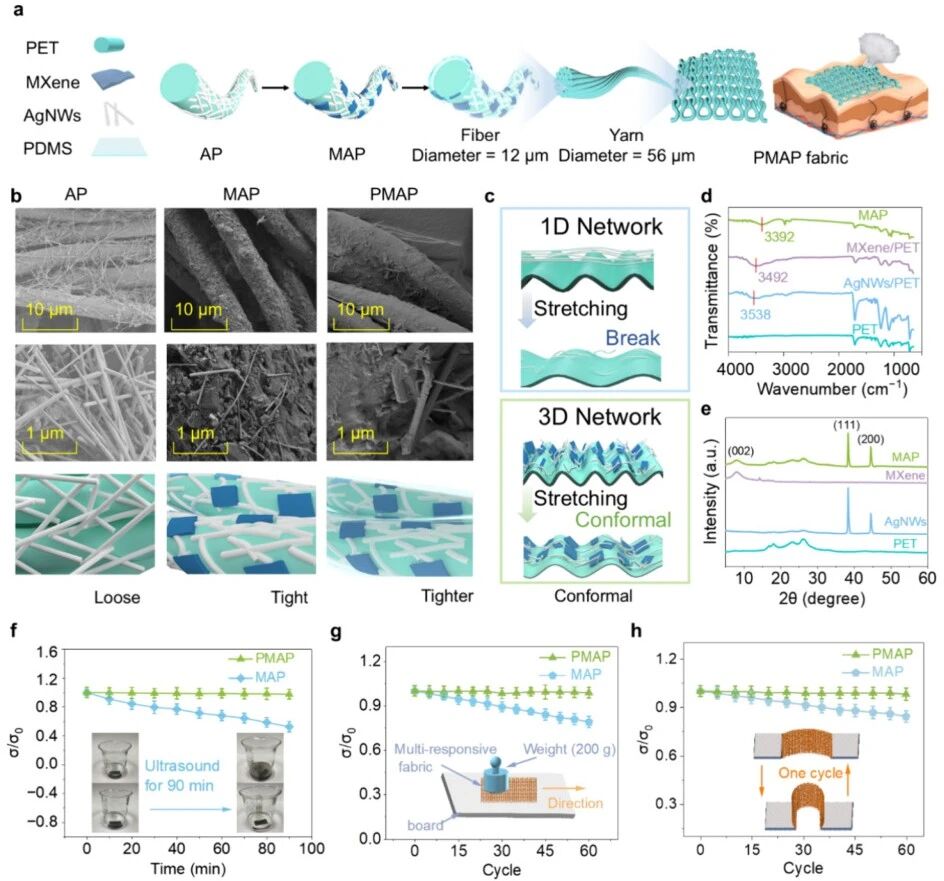
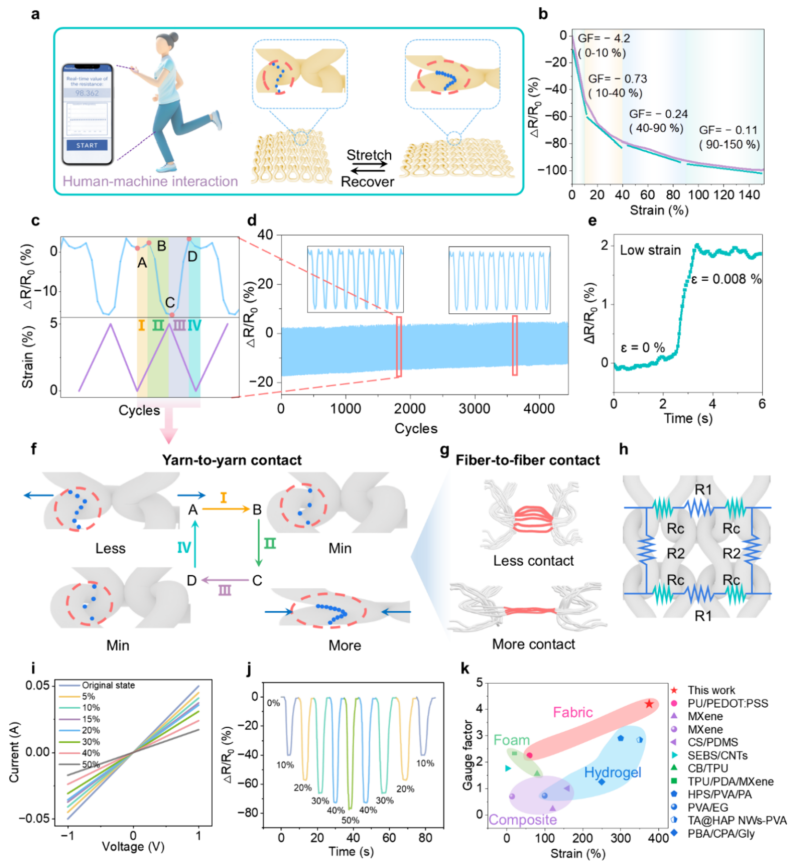
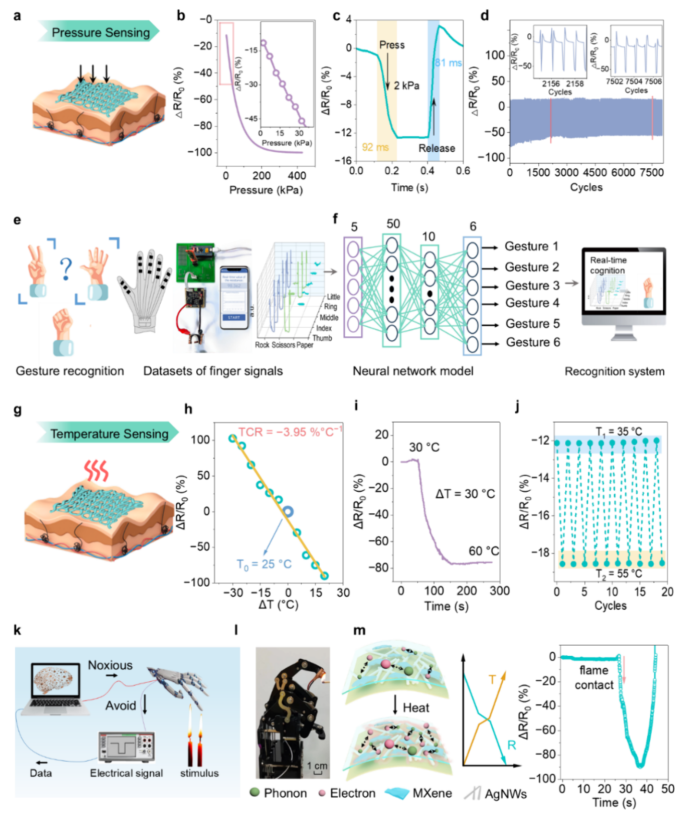
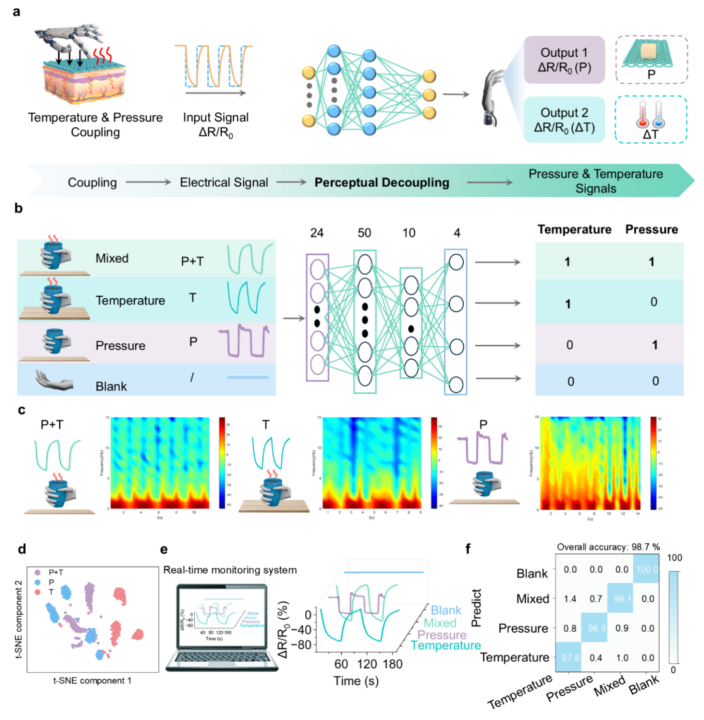
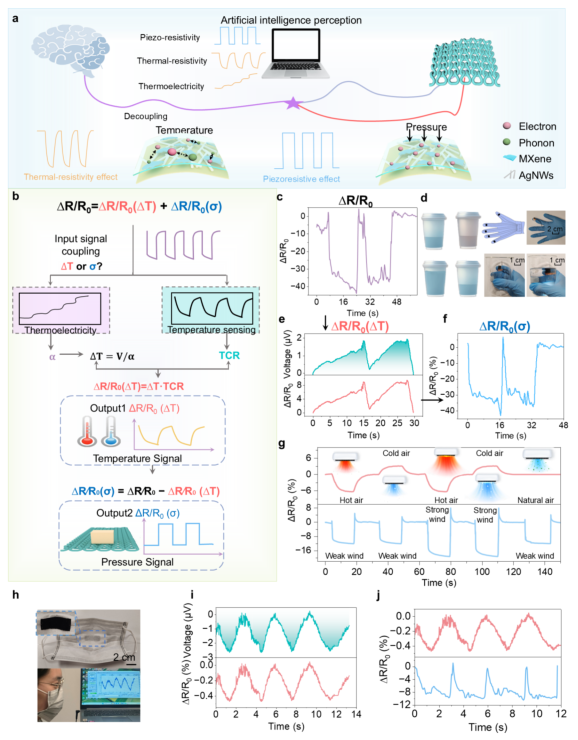
受人类皮肤感知机制的启发,浙江理工大学洪兴华副教授和新加坡国立大学Tan Swee Ching (陈瑞深)、郭帅合作开发了一种新型智能电子纺织品。该材料通过在针织聚酯基底上层层组装银纳米线、MXene纳米片和保护性聚二甲基硅氧烷,构建了仿生层状纳米结构,形成了高透气、耐用且生物相容的渗流纳米网络。该电子纺织品不仅具备应变、压力和温度多模态传感能力,还首次结合神经网络与热电压机制,实现了对温度与压力信号的定性与定量解耦,识别准确率超过98.7%。 相关工作以“Intelligent Temperature and Pressure Sensing Decoupling Systems in Multimodal Nanonetwork-based Electronic Textiles”为题发表于《ACS Nano》。 图1. 人工多模传感系统的配置与应用。(a) 生物皮传感系统及人工感知和分析来自外部物体的温度和压力信息的示意图。(b) 电子织物受到温度和压力时产生的信号及其机理示意图。(c) 多模态传感系统在信息传输、温度与压力解耦及手势识别中的应用。(d) 解耦策略的普适性说明。 结构设计与制备表征 研究团队采用交替浸涂法,将银纳米线和MXene纳米片依次组装在聚酯织物上,并覆盖聚二甲基硅氧烷保护层,制备出PMAP电子纺织品(图2a)。扫描电镜图像(图2b)显示,纯银纳米线仅松散附着在纤维表面,而引入MXene后形成了三维互联的导电网络,显著提升了结构的稳定性和导电性。拉伸过程中,这种三维网络能有效耗散能量并保持电子迁移路径(图2c)。红外光谱(图2d)和X射线衍射(图2e)证实,银纳米线、MXene和聚酯之间形成了大量氢键,增强了材料的机械性能。经过90分钟超声洗涤、60次摩擦循环和反复弯曲测试,PMAP织物的导电性几乎未受影响(图2f–h),同时仍保持469 mm·s⁻¹的高透气性,优于市售棉质T恤,且细胞实验证明其无毒性、生物相容性良好。 图2. PMAP织物的结构与形貌表征。(a) PMAP织物制备流程示意图。(b) SEM图像展示了AP、MAP和PMAP织物的微观结构特征,表明银纳米线和MXene片附着在聚酯上,表面涂覆有PDMS。(c) 示意图展示了一维AgNWs织物和三维MXene/AgNWs导电网络在拉伸前后的结构变化。(d) PET织物、MXene/PET织物、AgNWs/PET织物和MAP织物的红外光谱图。(e) PET、AgNWs、MXene和MAP织物的X射线衍射图谱。(f) MAP织物和PMAP织物经超声洗涤后的电导率变化(超声时间90分钟)。(g) MAP织物和PMAP织物在穿戴摩擦循环处理下的电导率变化。(h) MAP织物和PMAP织物在弯曲应力下的电导率变化。 拉伸与压力传感性能 PMAP织物的针织结构使其能够在拉伸过程中通过纱线和纤维间的接触点变化实现高灵敏应变感知(图3a)。其应变传感范围划分为0–10%、10–40%、40–90%和90–150%四个线性区间,规范因子分别为−4.2、−0.73、−0.24和−0.11(图3b)。在循环拉伸测试中,每个拉伸-释放过程出现两个微小峰值,表现出独特的负压阻效应(图3c–d),即使在0.008%的超低应变下仍可检测到信号(图3e)。基于纱线间和纤维间接触点变化的等效电路模型(图3f–h),解释了拉伸过程中接触点增加导致总电阻下降的负压阻机理。不同应变状态下的电流-电压曲线保持一致(图3i),并且在10%至50%的应变水平下信号稳定可辨(图3j)。与已有文献相比,该织物在低应变区间的灵敏度具有显著优势(图3k)。 图3. 针织结构产生的PMAP织物的拉伸传感机理及性能。(a) 织物传感器应用示意图及织物拉伸过程中导电网络的变化。(b) PMAP织物的相对电阻变化与应变的关系。(c) 高应变下的电阻变化,(d) 对应的加载-卸载循环放大图。(e) 低应变(0.008%)下的电阻变化。(f, g) 加载-卸载循环下,纱线-纱线和纤维-纤维尺度的结构单元变化。(h) 电阻应变各向异性的等效电路图,解释了PMAP织物的两种不同拉伸模式。(i) PMAP织物在不同应变状态(0%至50%)下的电压曲线。(j) PMAP织物在10%、20%、30%、40%和50%五种不同应变水平下循环拉伸的ΔR/R₀,拉伸速率为2 mm/s。(k) 本传感器与文献报道的传感器的压阻效应对比。 在压力传感方面,当施加压力时,纱线和纤维间的接触点增多,电阻下降(图4a)。电阻变化率与压力呈正相关(图4b),响应时间和恢复时间分别为92 ms和81 ms(图4c),在36 kPa压力下经过超过8000次循环仍保持稳定(图4d)。团队将该织物集成到智能手套中,结合无线传输装置,利用莫尔斯电码成功发送“ZSTU-NUS”和“TEXTILE”等信息(图4e–f,图S14)。进一步结合全连接神经网络,智能手套实现了动态手势识别,平均识别准确率高达98.17%(图4f)。 图4. 传感器的工作原理与性能评估。(a) 电子织物的压力传感示意图。(b) 步进压力下的相对电阻变化(ΔR/R₀)。(c) PMAP织物的响应时间。(d) PMAP织物在36 kPa压力加载-卸载循环8000次中的一致性能。(e) 基于PMAP织物的智能手套结构示意图,该织物通过无线传输装置实现信息交互。(f) 神经网络手势识别流程图。(g) PMAP织物温度传感示意图。(h) PMAP织物的相对电阻随温度的变化。(i) 在30 °C大温度变化下的相对电阻变化响应曲线。(j) 温度在35 °C和55 °C之间循环时的相对电阻变化。(k) 用于火焰检测和报警的温度传感。(l) 使用机械臂进行火焰报警测试。(m) 温度传感机理示意图及织物接触火焰时的电阻变化曲线。 温度传感与定性识别 PMAP织物在25–75 °C范围内呈现稳定的负温度系数(−3.95% °C⁻¹),电阻随温度升高而下降(图4h)。在30 °C温差下的循环测试中表现出高度可重复的电阻变化(图4i–j)。当接触火焰时,织物内部热激发载流子迁移加快,电阻迅速下降,可作为火焰预警传感器(图4k–m)。 在温度与压力信号同时存在的情况下,研究团队构建了神经网络进行定性识别(图5a)。空白、温度、压力及混合作用下的电阻变化曲线各具特征(图5b),通过时频分析和t-SNE聚类(图5c–d)可清晰区分。经过训练的神经网络对四种不同工况的平均识别准确率达到98.7%(图5f)。 图5. 温度和压力电阻变化的定性识别系统。(a) 神经网络定性和压力信号的流程图。(b) PMAP织物在空白、温度、压力及混合作用下的电阻变化曲线。(c) 温度引起的电阻变化、压力引起的电阻变化以及温度-压力耦合引起的电阻变化的时频分析对比。(d) t-SNE图显示了不同电阻变化曲线的独特特征。(e) 材料温度和压力曲线识别系统的输入。(f) 预测结果对应的混淆矩阵。 定量解耦与多功能应用 为实现温度与压力信号的定量分离,研究团队提出基于热电效应的解耦方法(图6a–b)。材料的塞贝克系数与压力无关,通过测量热电压可独立获得温度差ΔT,再结合电阻温度系数计算出温度引起的电阻变化,进而从总电阻变化中分离出压力引起的部分。该方法成功应用于水杯抓取(图6c–f)、空调环境监测(图6g)和呼吸监测(图6h–j)。例如,在抓取水杯时,通过记录总电阻变化曲线和热电压曲线,结合已知的塞贝克系数和电阻温度系数,可分别得到温度和压力各自引起的电阻变化,从而独立识别水杯温度和抓握力。在呼吸监测中,集成于口罩的电子纺织品能够将呼吸动作引起的机械形变与气流带来的热变化成功解耦,分别提取出反映呼吸运动的压力信号和反映气流方向的温度信号,为异常呼吸行为识别提供更准确的多维信息。 图6. 温度-压力电阻变化解耦系统。(a) 温度-压力解耦示意图,以及热阻和压阻的机理。(b) 对应材料温度和压力的电阻变化比例定量分析流程图。(c) 拿起一杯水时的电阻变化率。(d) 通过解耦系统识别马克杯的温度和拿起它所需的抓握力。(e) PMAP织物接触水杯时产生的热电压及热电压对应的电阻变化率。(f) 利用(e)中温度引起的电阻变化数据对(c)中总电阻变化数据进行解耦,得到受压力影响的电阻变化曲线。(g) PMAP织物在空调不同风速和温度条件下的温度-压力解耦曲线。(h) 集成到口罩中的电子织物用于呼吸传感。(i) 呼吸过程中温度产生的热电压及相应的电阻变化。(j) 呼吸过程中温度和压力引起的电阻变化。 总结与展望 本研究成功开发了一种兼具高透气性、生物相容性和耐久性的电子纺织品,通过三层自组装方法实现了宽应变范围(~0.008%–400%)、温度灵敏度(TCR = −3.95% °C⁻¹)和快速压力响应(92 ms)。结合神经网络和热电压机制,研究团队首次在单一传感器平台上实现了对温度和压力信号的定性与定量解耦,有效消除了多模态感知中的信号串扰。该解耦策略具有材料普适性,可推广至不同传感系统。研究团队认为,这种电子纺织品在信息交互、健康监测和下一代人机界面等领域展现出广阔的应用前景。