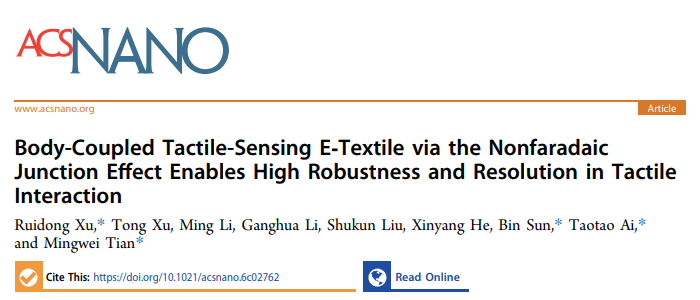
柔性触觉传感设备是可穿戴交互电子系统的核心组件,然而传统阵列式传感器面临着空间分辨率与环境鲁棒性难以兼得的根本性挑战(图1A)。现有方案中,低密度像素阵列导致触觉轨迹识别精度不足;若简单提升阵列密度,则会带来信号串扰、响应延迟(可超1000毫秒)及制造成本激增等问题。层状无阵列架构虽能实现一维线性轨迹的高分辨识别,但在二维轨迹的解析上仍受限于“双轴独立组合”的本质,难以达到真正的高精度触觉定位(图1B)。因此,开发兼具结构简单性与高分辨感知能力的无阵列柔性触觉器件,成为该领域的重要攻关方向。
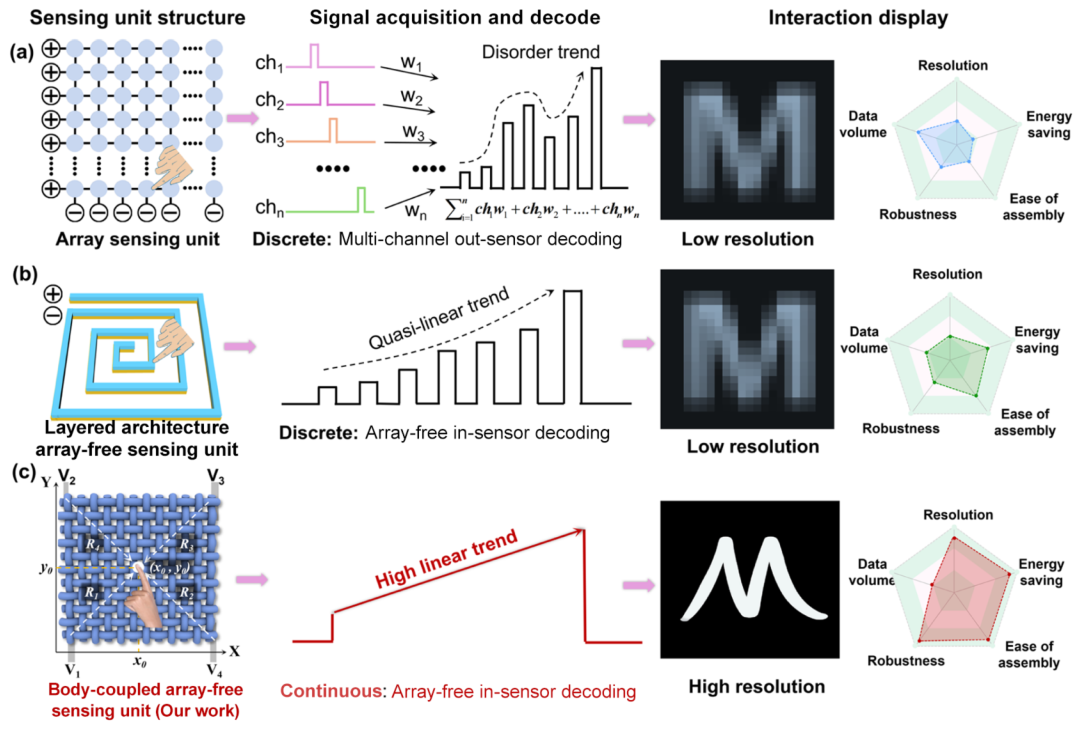
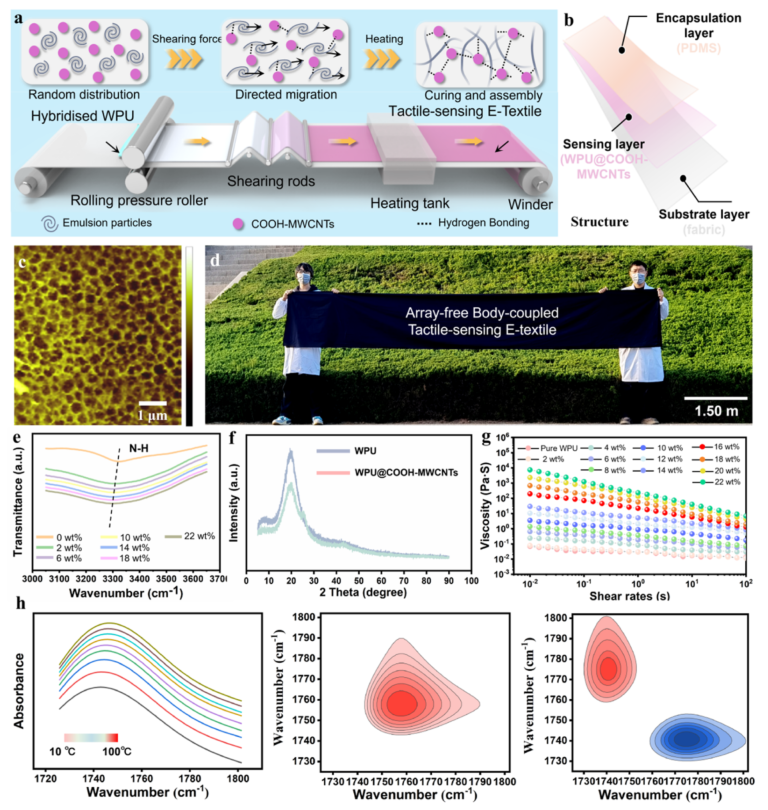
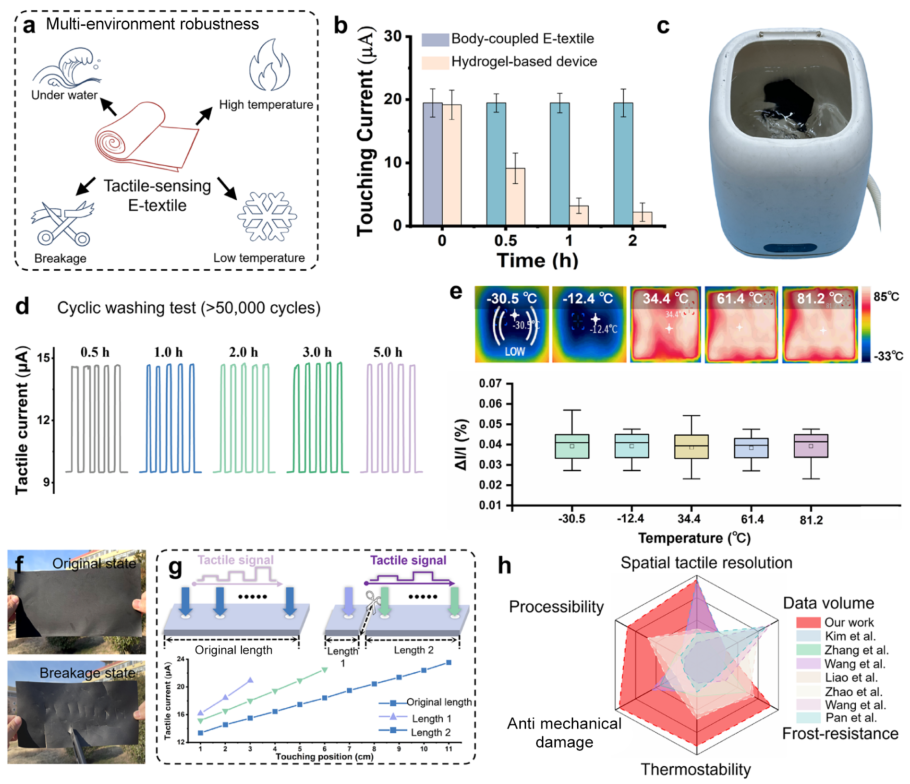
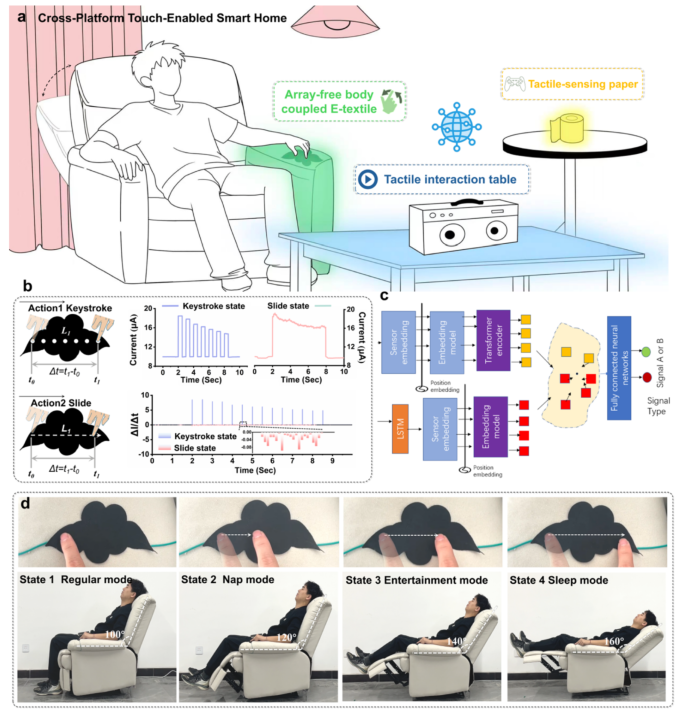
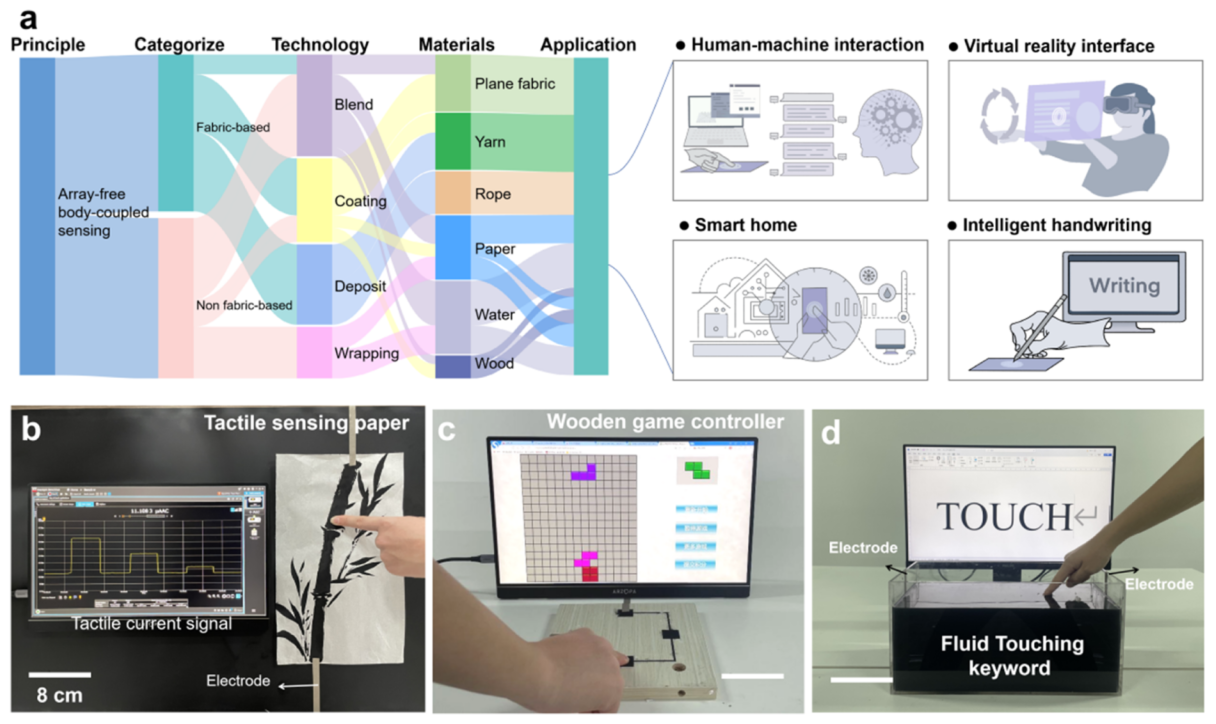
针对上述难题,陕西理工大学艾桃桃教授、徐瑞东博士和青岛大学田明伟教授、孙彬教授合作,成功开发出一种基于非法拉第结效应的体耦合无阵列触觉传感电子纺织品。该E-textile利用人体与织物界面间的纯电容耦合特性,在手指接触瞬间(<40毫秒)产生连续、线性梯度且互补的触觉电流信号,从而无需复杂集成电路即可实现高精度的触摸坐标定位,甚至能清晰追踪手写轨迹。更为突出的是,该织物在极端温度(-30℃至80℃,误差<0.0017%)、机械损伤及循环洗涤(超50000次)等恶劣条件下均展现出卓越的稳定性,并可拓展至纸张、木材甚至水等不同介质,为下一代人机交互界面提供了极具潜力的平台(图1C)。 相关论文以“Body-Coupled Tactile-Sensing E-Textile via the Nonfaradaic Junction Effect Enables High Robustness and Resolution in Tactile Interaction”为题,发表在ACS Nano上。 图1. 触觉传感器件性能比较。 (a) 传统阵列式触觉传感器件:离散信号与低分辨率。 (b) 具有层状结构的无阵列触觉传感器件:连续信号与低分辨率。 (c) 本工作中的体耦合无阵列触觉传感电子纺织品:连续信号与高分辨率。 研究团队采用传统纺织涂层工艺,通过在水性聚氨酯中均匀分散羧基化多壁碳纳米管,并利用三组不同转速的剪切辊系统,在棉织物表面形成了均匀连续的导电涂层(图2A、图2B)。原子力显微镜图像与实物照片显示了织物表面形貌及宏观形态(图2C、图2D)。傅里叶变换红外光谱与X射线衍射分析证实,碳纳米管上的羧基与聚氨酯的酰胺基团间形成了氢键相互作用,这不仅促进了导电填料的均匀分散,还诱导了聚合物的有序排列(图2E、图2F)。流变学测试表明,当碳纳米管质量分数为18wt%时,导电浆料具有最佳的综合涂覆性能(图2G)。此外,变温红外光谱分析显示,即使温度从10℃升至100℃,浆料中分子间氢键仍能保持稳定,为E-textile的宽温域稳定性奠定了材料基础(图2H)。 图2. 无阵列体耦合触觉传感E-纺织品的制备流程示意图。 (a) 涂层设备示意图。 (b) E-纺织品的结构示意图。 (c) E-纺织品的原子力显微镜图像。 (d) E-纺织品的照片。 (e) WPU@COOH-MWCNTs复合导电浆料的傅里叶变换红外光谱。 (f) 羧基化碳纳米管对复合导电浆料结晶性能的影响。 (g) 羧基化碳纳米管质量分数对复合导电浆料粘度动力学的影响。 (h) 复合导电浆料的变温红外光谱。 该E-textile的传感机制源于人体与极化织物之间的非法拉第结效应。当手指接触时,人体真皮层内丰富的Na⁺、Cl⁻等自由离子在库仑力作用下于接触点发生高频振荡位移,但该运动被限制在纳米级德拜长度内,不足以跨越电化学势垒引发氧化还原反应,从而在界面形成纯电容耦合,产生触觉电流信号(图3A、图3B、图3C)。COMSOL多物理场仿真表明,手指接触会破坏织物表面均匀的静电场分布,形成电场梯度,促使两端电极向触点供电(图3D)。实验显示,当从一端向中点逐次触摸时,左端电流线性下降而右端电流线性上升,两者变化幅度对称(约0.50μA)(图3E)。触觉电流信号展现出优异的稳定性(图3F)。基于此,团队推导出坐标定位公式:左端归一化距离x与右端距离1-x可分别由两路电流与总电流的比值确定。 在二维定位验证中,正方形的E-textile四个角施加等幅高频交流电。手指接触时,织物电阻被分割为四个与距离相关的单元,产生空间依赖的电流分布。触摸预设的五点位置时,最近的电极记录到最大电流(如P1点达18.606μA),对角电极电流最小,相邻电极读数相近(图3G、图3H、图3I)。通过特定方向的电流求和,即可准确解析触摸点的二维坐标。基于此原理,团队构建了闭环数据转换电路模块,实现了无需复杂电路系统的高分辨率手写交互演示(图3J、图3K)。此外,该E-textile对压力和弯曲变形不敏感:在100至10000kPa的广泛压力范围内,触觉电流波动仅1.63%;即使在80°弯曲变形下,各点电流仍保持恒定,展现出优异的抗干扰能力。 图3. 无阵列体耦合触觉传感E-纺织品的传感机理。 (a) 人体与E-纺织品之间非法拉第结的产生及信号通路示意图。 (b) 非法拉第结效应诱导人体内自由离子运动趋势示意图。 (c) E-纺织品与人体耦合的电学原理示意图。 (d) E-纺织品内部电场变化的COMSOL仿真图。 (e) 等间隔触摸E-纺织品时触觉电流的变化趋势。 (f) 触觉电流的稳定性。 (g-i) E-纺织品触觉电流的变化趋势。 (j) 闭环交互系统示意图。 (k) 高分辨率手写交互演示。 环境鲁棒性是这款E-textile区别于传统凝胶基传感器的核心优势。经过长时间水浸及标准洗衣机程序洗涤(累计5小时)后,其触觉电流最大偏差不超过0.21%(图4A、图4B、图4C、图4D)。这得益于聚氨酯分子链上的-NH-、-C=O与纤维素分子链上的-OH之间形成的密集氢键网络,以及聚氨酯渗入棉纤维微观凹槽后固化形成的机械互锁结构,配合表面PDMS封装,赋予了织物超强的耐洗涤性能。在-30.5℃至81.2℃的110℃宽温域内,触觉电流测量最大偏差小于0.048%(图4E)。这种极端温度稳定性源于水性聚氨酯的“海岛”微相分离结构:硬段形成的刚性“岛屿”通过强氢键交联构成稳定骨架,防止不可逆变形;而柔性的软段在低温下仍保持运动能力,避免材料脆断。更有趣的是,即使将E-textile任意切割,各碎片仍能保持一致的触觉定位功能,仅因长度不同导致电阻变化,可通过电压调节轻松补偿(图4F、图4G)。与其他相关工作的性能比较进一步凸显了本工作的优势(图4H)。 图4. 无阵列体耦合触觉传感E-纺织品的环境鲁棒性。 (a-d) E-纺织品的耐洗涤性能。 (e) 极端温差(-30至80℃)下,E-纺织品相同位置的触觉电流变化趋势。 (f-g) 任意切割后,不同长度E-纺织品碎片中触觉电流的变化趋势。 (h) 与其他相关工作的性能比较。 在智能家居交互演示中,研究团队将E-textile集成至传统沙发,打造出具备自适应手势识别功能的智能沙发(图5A)。该沙发支持点按与滑动两种操作模式:点按产生柱状脉冲电流信号,滑动则生成连续曲线(图5B)。通过构建基于Transformer神经网络的多模态手势识别系统(包含一维CNN局部特征提取、多头自注意力时序建模、图神经网络时空融合及全连接输出等模块),模型在训练集和验证集上的识别准确率分别高达99.97%和99.24%(图5C)。据此,沙发靠背可根据手指滑动位置实现平滑连续的角度调节,彻底改变了传统物理开关碎片化操作与延迟反馈的体验(图5D)。 图5. 无阵列体耦合触觉传感E-纺织品的交互展示。 (a) 智能沙发的概念图。 (b) 不同触发模式下的电特征值。 (c) 基于Transformer神经网络架构的手势意图识别系统。 (d) 滑动触发模式下,手指滑动位置对智能沙发靠背角度的调节过程。 该体耦合触觉传感技术不仅能赋能纺织品,还可拓展至纸张、木材和水体等非纺织基材。普通宣纸可绘制个性化触觉图案,木质桌面能变身游戏控制面板,甚至非固体介质的水也可获得触觉交互功能(图6A、图6B、图6C、图6D)。这种普适性使得物理世界与数字世界的界限进一步模糊,为用户带来更智能、便捷的日常交互体验。 图6. 面向多物体的触觉智能升级。 (a) 无阵列体耦合传感技术的推广及其在未来多种交互场景中的应用前景。 (b) 触觉感知宣纸。 (c) 游戏控制板。 (d) 液体触摸关键词。 总结而言,本工作通过高频极化电场诱导人体真皮内离子定向运动,产生非法拉第结效应,从而在无阵列E-textile上实现了高空间分辨率的稳定触觉感知。其全纺织品结构、低成本材料与自动化制造工艺具备大规模工业生产的潜力。无论极端环境还是日常磨损,该织物均能保持稳定性能。更广泛地,该传感技术可延伸至纸张、木材乃至水体等多种常见材料,真正架起了物理与数字现实之间的桥梁,有力推动人机融合技术的进步。