
近日,我校机械工程与自动化学院余联庆教授课题组青年教师樊飞博士在面向织造车间智能物流机器人轨迹跟踪控制方面取得了重要研究进展。相关成果以“Spatiotemporal path tracking via deep reinforcement learning of robot for manufacturing internal logistics”在工程技术领域主流高水平期刊《Journal of Manufacturing Systems》(中科院一区Top,IF12.1,ISSN:1878-6642)上发表。该论文的第一单位为武汉纺织大学,第一作者为机械学院樊飞博士。

随着工程技术的发展,轮式移动机器人(WMR)和自动导引运输车(AGV)在智能物流中的应用越来越广泛。然而,织造车间中织机之间的巷道宽度、布辊长度、运输效率等应用场景特征严重限制了传统WMR或AGV的适应性。因此,我们开发了一种布卷搬运机器人(CHR),该机器人将AGV的安全性和效率特性与WMR的智能化特性相结合,使织造车间的物流智能化成为可能。这种新型机器人采用超长机身,以适应长布辊和狭窄巷道的场景特征。然而,超长机体的设计对复杂轨迹跟踪性能和机器人安全性提出了更高的要求。复杂的织造车间环境也对高精度控制提出了新的挑战。
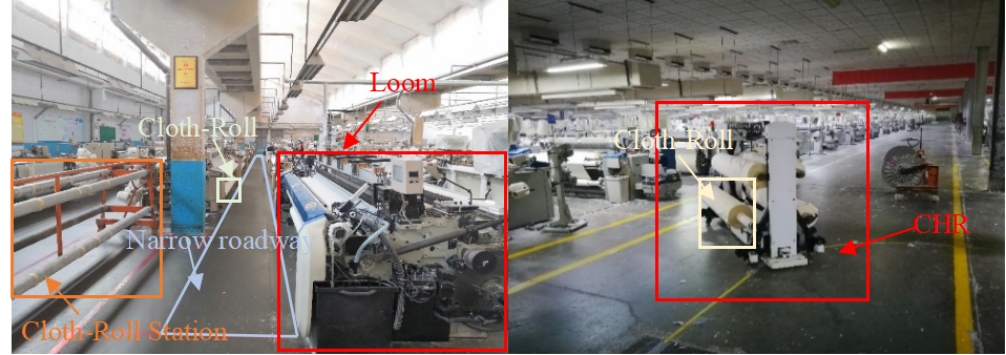
图一织造车间及布卷搬运机器人
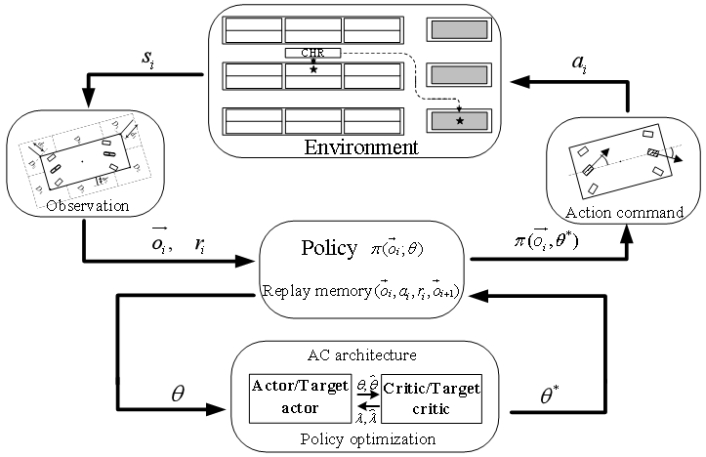
图二面向机器人路径跟踪的混合DRL框架
通常,基于模型的方法一直是开发控制器的首选,然而,非线性问题和外部扰动的耦合使模型具有不确定性,这对控制精度和稳定性有很大影响。深度强化学习(DRL)方法不需要系统模型,可以通过合理的端到端训练过程获得良好的性能。然而,DRL的训练阶段通常需要大量的时间,这对于模拟机器人或对抗性游戏来说是可以接受的,但不适合真实场景。自然,基于模型和DRL的混合控制方法可能是开发机器人控制器的好选择。因此,为了解决工业环境中的全局路径动态跟踪问题,本研究提出了一种结合场景建模的混合DRL框架。该方法为高精度路径跟踪控制提供了一种新的解决方案。
来源:武汉纺织大学新闻文化网