人工肌肉是仿生智能器件的核心,实现驱动与自传感的协同优化,是提升其在智能机器人和假肢等领域应用价值的关键。受蜘蛛裂缝感受器的启发,研发兼具高灵敏度、大变形范围与优异线性度的具有自感知功能的人工肌肉,是攻克这一难题的重要方向。
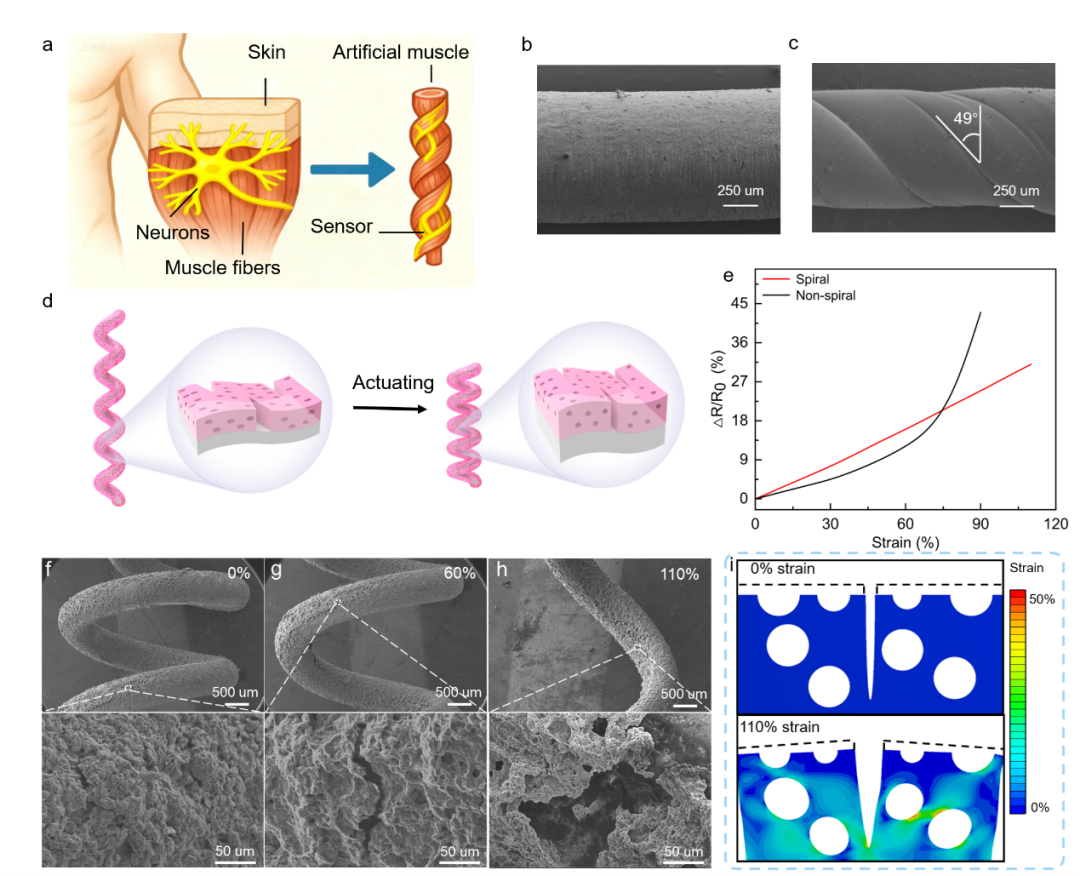
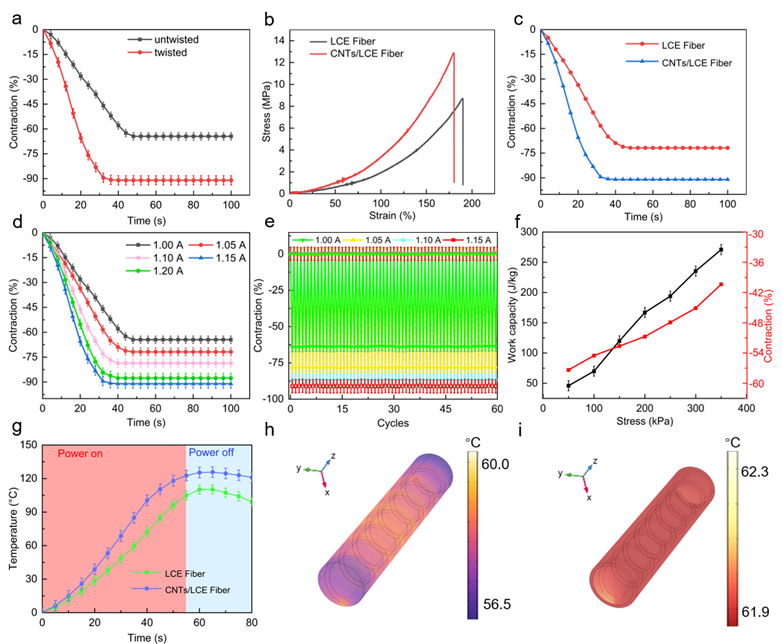
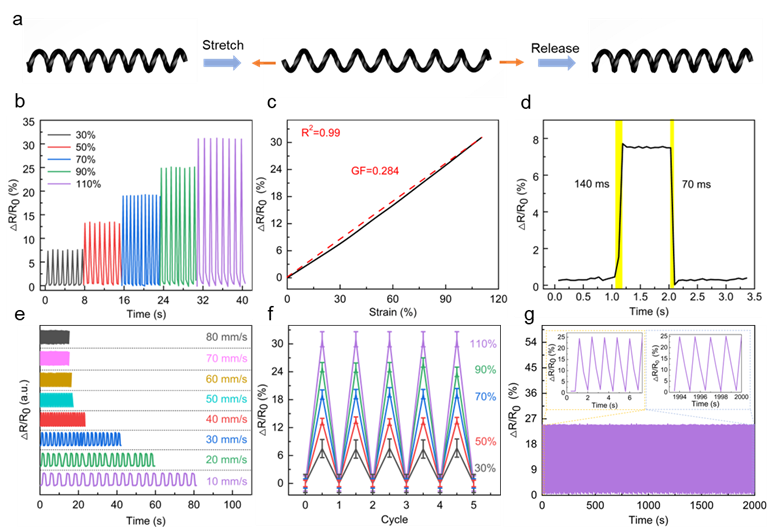
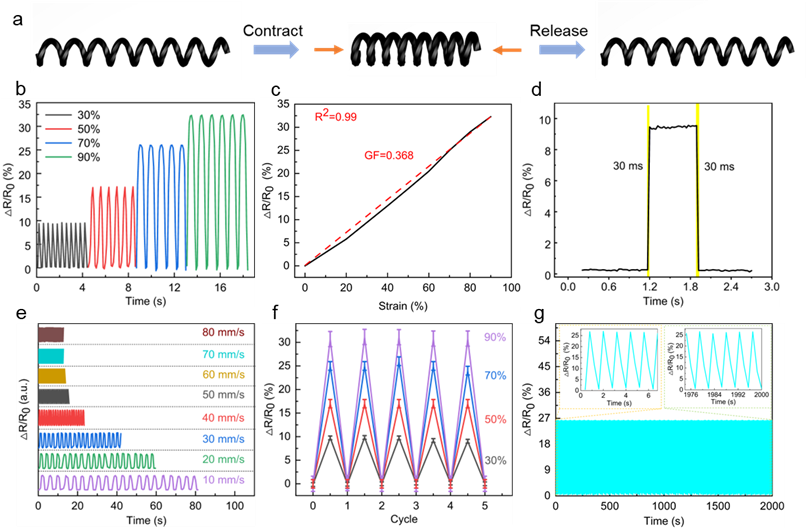
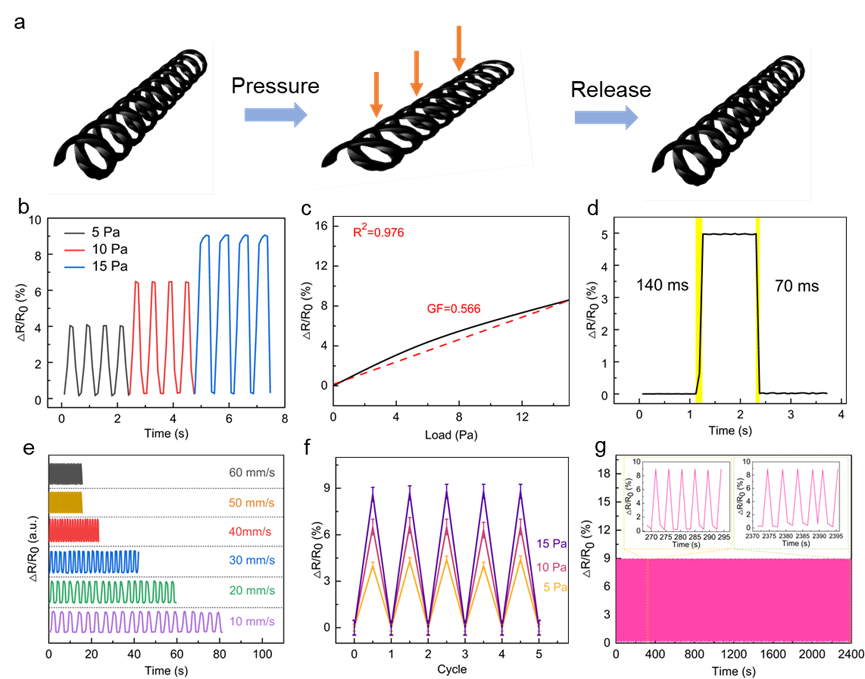
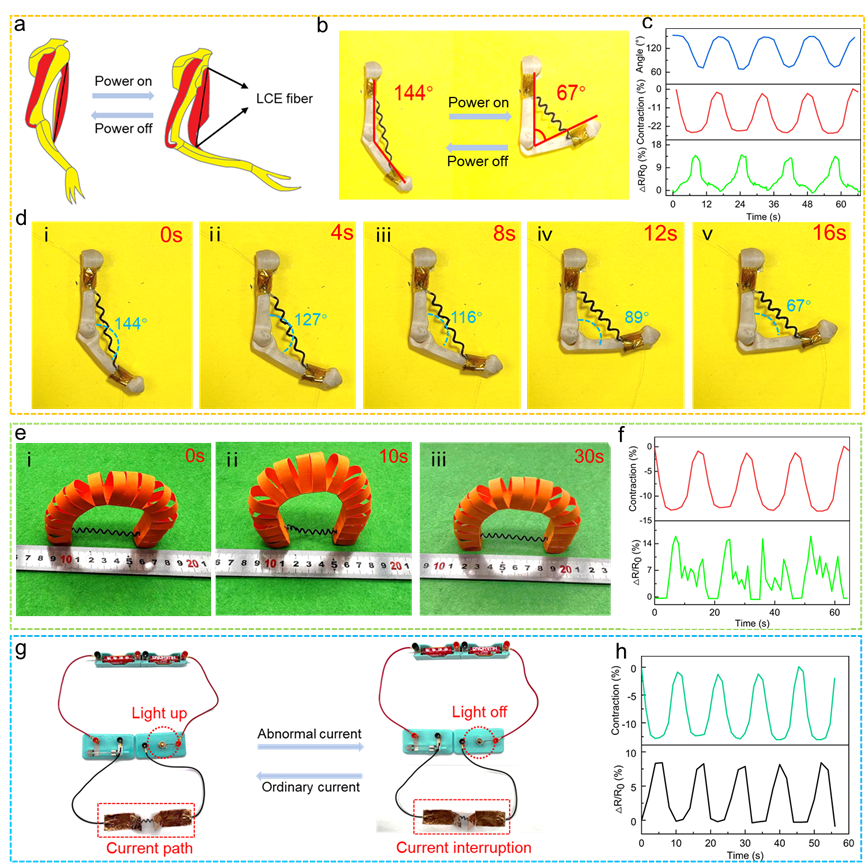
近期,天津理工大学秦文静、王艳丽、南开大学刘遵峰、中国药科大学周湘合作团队在Advanced Fiber Materials上发表了题为 “Spider-Inspired Helically Engineered Fiber-Based Artificial Muscle with Coupled Actuation and Self-Sensing Capabilities” 的研究成果。该工作开发了一种自感知碳纳米管/液晶弹性体(CNTs/LCE)螺旋纤维人工肌肉,将多孔裂纹传感单元与螺旋变形机制相结合,实现了大变形范围(拉伸达110%)、高响应线性(R2=0.99)与驱动-传感的高效结合,在仿生机器人、智能假肢、电路保护等领域展现出巨大应用潜力。 该研究以蜘蛛裂缝传感器为原型,设计了自感知CNTs/LCE 螺旋人工肌肉,通过螺旋结构、多孔结构与裂纹传感结构的协同设计,突破了传感与驱动性能的协同优化瓶颈。在自感知CNTs/LCE螺旋纤维人工肌肉中,螺旋结构兼具人工肌肉驱动器与应变放大双重功能,“一石二鸟”的设计大幅提升了应变感知范围。引入的裂纹结构显著提高传感灵敏度,多孔结构则有效分散裂纹尖端应变、抑制裂纹扩展,螺旋几何可实现最高110%拉伸应变,且传感线性度R2=0.99,解决了传统裂纹传感器应变范围窄的问题(图1)。 图 1 自感知CNTs/LCE螺旋纤维人工肌肉的结构表征 CNTs的引入实现了多重性能提升:其一,CNTs网络作为高效导热层,优化LCE纤维内部的温度分布均匀性,COMSOL模拟显示CNTs包覆后纤维内部温差仅0.4℃,远低于纯LCE纤维;其二,优异的光电热转换效率使人工肌肉的收缩行程提升19.2%,收缩时间缩短8秒;其三,CNTs网络构建了稳定的导电通路,可对拉伸、收缩、压缩等力学刺激实时精准感知(图2)。 图 2 自感知CNTs/LCE螺旋纤维人工肌肉驱动性能表征 该螺旋人工肌肉展具有拉伸、收缩、压缩三种模式的高灵敏传感性能:拉伸传感的灵敏度(GF)为0.284,响应和恢复时间分别为140和70 ms(图3);收缩传感GF=0.368,响应和恢复时间仅30 ms(图4);压缩传感可检测低至5 Pa的压力,GF=0.566(图5)。同时器件循环稳定性优异,可完成1000次大应变循环(110%拉伸、70%收缩、15 Pa压缩),信号无明显漂移。 图3 自感知CNTs/LCE螺旋纤维人工肌肉拉伸传感性能 图4 自感知CNTs/LCE螺旋纤维人工肌肉收缩传感性能 图5 自感知CNTs/LCE螺旋纤维人工肌肉压缩传感性能 基于该人工肌肉的驱动-传感一体化特性,研发了仿生机械臂,在施加2 V电压下可实现144°弯曲,并实时输出传感信号;仿毛虫爬行软机器人可通过周期性电刺激实现类毛毛虫的蠕动爬行,同时监测爬行过程中的信号;智能电路保护器可在正常工作时保持电路连通,电流过载时自动收缩断开,实现智能保护(图6)。 图6 自感知CNTs/LCE螺旋纤维人工肌肉的应用展示 该研究受蜘蛛裂缝感受器启发,通过螺旋、多孔、裂纹结构的协同设计,成功研发了驱动-传感一体化的CNTs/LCE螺旋纤维人工肌肉,实现91%高收缩率、110%的大拉伸应变、高线性响应(R2=0.99)与多感知传感,解决了传统人工肌肉传感与驱动性能难以兼顾、稳定性差的难题,为仿生智能人工肌肉的结构设计与性能优化提供了新思路,所制备的器件在仿生机器人、智能假肢、可穿戴设备、智能电路控制等领域具有广阔的应用前景。